Umlaufrädergetriebe
Umlaufrädergetriebe sind Zahnrad- oder Reibradgetriebe, die neben gestellfesten Wellen auch Achsen besitzen, die auf Kreisbahnen im Gestell umlaufen.[1] In vielen Ausführungen sind die umlaufenden Achsen parallel zu den gestellfesten Wellen, was anschaulich begründet, warum die Umlaufrädergetriebe oft auch als Planetenrädergetriebe (kurz: Planetengetriebe) bezeichnet werden. Die auf den umlaufenden Achsen drehenden Räder umkreisen ein zentrales Rad ähnlich wie Planeten die Sonne.
Umlaufrädergetriebe sind kompakt bauende Getriebe mit dem besonderen Merkmal, dass Antriebs- und Abtriebs-Welle zueinander fluchten.

Grundlegender Aufbau
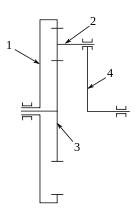
Ein einfaches Standgetriebe (keine umlaufenden Achsen) hat im Minimum zwei Wellen und ist einstufig (nur eine Radpaarung). Ein Umlaufrädergetriebe hat im Minimum zwei Wellen und eine umlaufende Achse und ist zweistufig. Zwei gestellfeste Wellen werden in technischen Anwendungen benötigt, man braucht eine treibende und eine getriebene Welle. Der Umlauf des Rades (Umlaufrad 2, Bilder unten) muss koaxial zu beiden umkreisten Rädern (3 und 1), mit denen es gepaart ist, erfolgen. Folglich sind diese beiden gestellfest drehenden Räder sogenannte Zentralräder. Und beide und der Steg (4), der die Achse mit dem umlaufenden Rad trägt, sind gleichachsig.[2]
Unterschiedliche Bauformen ergeben sich aus der Form des zweiten Zentralrades (1 oder 3) und dadurch, dass ein einfaches Umlaufrad (2) oder Umlaufradpaare (2 und 2') vorkommen. Ist das zweite Zentralrad ein Hohlrad, so ist das Getriebe besonders schmal (einfaches Umlaufrad, 2).
-
 Das zweite Zentralrad (1) ist ein Hohlrad (innenverzahnt).
Das zweite Zentralrad (1) ist ein Hohlrad (innenverzahnt). -
 schmales Umlaufradgetriebe mit Hohlrad (innenverzahnt), zweites Umlaufrad (oder weitere, s. Bild oben) entlastet das Getriebe mechanisch
schmales Umlaufradgetriebe mit Hohlrad (innenverzahnt), zweites Umlaufrad (oder weitere, s. Bild oben) entlastet das Getriebe mechanisch -
 Umlaufradpaare (2 und 2')
Umlaufradpaare (2 und 2')
Zweites Zentralrad (1) und Sonnenrad (3) sind außenverzahnt. -
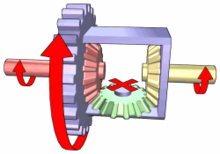 Kegelrad- Differentialgetriebe
Kegelrad- Differentialgetriebe
Das große Zahnrad ist nicht Bestandteil dieses besonderen Umlaufrädergetriebes.




Wenn die umlaufende Achse parallel zu den gestellfesten Wellen ist und alle Räder Stirnräder sind, erscheinen die Räder im achs-senkrechten Schnittbild als kreisförmige Körper. Das umlaufende Rad umkreist das außenverzahnte Zentralrad wie ein Planet, was zur generellen, aber nicht immer treffenden Bezeichnung der Umlaufgetriebe als Planetengetriebe geführt hat. Man spricht vom das Sonnenrad umkreisenden Planetenrad.
Beim Kegelrad-Differentialgetriebe, dem meist verwendeten Umlaufrädergetriebe, schneidet die Mittellinie der umlaufenden Achse die gestellfeste zentrale Mittellinie rechtwinklig. Seine Bezeichnung als Planetengetriebe ist im oben genannten Sinne nicht treffend. Die beiden Zentralräder sind spiegelbildlich gleiche Kegelräder. Das Umlaufrad ist auch ein Kegelrad, der Steg hat die Form eines Käfigs.
Betriebsarten
Im Allgemeinen hat ein Umlaufrädergetriebe drei Wellen, von denen aber oft eine festgehalten wird (Zweiwellenbetrieb), beispielsweise der Steg (siehe oben: zweite Illustration oder unten: Animation). Ist das Sonnenrad treibend, so ist das Hohlrad das getriebene und umgekehrt. Welche Welle/Rad festgehalten wird und welche/s als Antrieb beziehungsweise als Abtrieb dient, hängt von der zu lösenden Konstruktionsaufgabe ab.
In bestimmten Anwendungen drehen sich alle drei Wellen (Dreiwellenbetrieb). Dann sind zwei treibend und eins getrieben (Additionsgetriebe) oder umgekehrt (Verteilgetriebe).


Zweiwellenbetrieb
Im Zweiwellenbetrieb ist das Getriebe zwangläufig (Laufgrad F = 1). Beim Antrieb einer Welle ist die Drehung der zweiten eindeutig.
Man unterscheidet zwischen Standübersetzung und Umlaufübersetzung:
- Bei der Standübersetzung steht die Stegwelle still, und die beiden Zentralradwellen (also Sonnen- und Hohlrad) bewegen sich. Die ruhende Welle kann fest mit dem Gehäuse verbunden sein oder durch eine Bremse oder eine Freilaufkupplung festgehalten werden.
- Bei der Umlaufübersetzung steht eine der beiden Zentralradwellen still. An- und Abtrieb erfolgen über die drehende Zentralradwelle und über die Stegwelle.
Dreiwellenbetrieb
Im Dreiwellenbetrieb hat das Getriebe zunächst den Laufgrad F = 2. Es arbeitet als Summiergetriebe oder Verteilgetriebe:
- Beim Summiergetriebe treiben 2 Wellen an, und 1 Welle ist getrieben. Beispiel ist das Summiergetriebe in der Hinterradnabe eines Elektrofahrrads.[3] Die Antriebsdrehzahlen werden frei gewählt, die Abtriebsdrehzahl ist dadurch eindeutig. Durch die Vorgabe der beiden Antriebsbewegungen ist schließlich Zwangläufigkeit (F = 1) gewährleistet.
- Beim Verteilgetriebe treibt eine Welle an und zwei Wellen sind getrieben. Das Drehzahlverhältnis der beiden Abtriebswellen muss festgelegt sein. Das bekannteste Beispiel eines Verteilgetriebes ist das Differentialgetriebe am Kraftfahrzeug. Hier wird das Drehzahlverhältnis durch den Radabstand und den Kurvenradius festgelegt. Durch den Reibkontakt der Räder mit dem Boden ist schließlich Zwangläufigkeit (F = 1) gewährleistet.
Mehrfach- oder Koppelgetriebe
Oft wird nicht nur der hier geschilderte einfache Umlaufradsatz als Umlaufgetriebe bezeichnet, sondern auch eine auf dieser Grundbauform beruhende Kombinationen mehrerer, in- und hintereinander geschalteter Zahnräder. Beispiel sind die Nabenschaltungen am Fahrrad, bei der mit einem Mehrfachgetriebe mehr als die mit einfachen Umlaufradsatz erreichbaren drei Gänge möglich wurden.
Weitere Beispiele für Mehrfachgetriebe sind der Ravigneaux-Satz oder das Lepelletier-Getriebe.
Kinematik
Kutzbachplan
Die Übersetzungen am Umlaufrädergetriebe können anschaulich mit Hilfe des Kutzbachplanes dargestellt und graphisch ermittelt werden.

Willis-Gleichung
Zur analytischen Darstellung genügt eine einzige Gleichung, die sogenannte Willis-Gleichung:[Anmerkung 1]

Darin ist die sogenannte Standübersetzung des Umlaufrädergetriebes, welche das Drehzahlverhältnis zwischen den beiden Zentralwellen 1 und 2 bei festgehaltenem Steg S beschreibt:

- .

Meistens haben die beiden gleichachsigen Zentralräder gegensätzliche Drehrichtungen, und die Standübersetzung ist negativ (sogenanntes Minusgetriebe, Gegenteil: Plusgetriebe). Jedes der beiden Zentralräder kann treibendes Rad 1 oder getriebenes Rad 2 sein.
Die Willis-Gleichung gilt unabhängig davon, wie das Umlaufrädergetriebe im Inneren aufgebaut ist. Die umlaufenden Räder werden von ihr nicht erfasst. Mit der Standübersetzung zwischen zwei der drei gestellfesten Wellen sind die übrigen Drehzahlverhältnisse zwischen den gestellfesten Wellen bestimmt.
Im Zweiwellenbetrieb gibt es sechs Kombinationen für eine treibende, eine getriebene und eine festgehaltene Welle. In der folgenden Tabelle ist die Willis-Gleichung beispielsweise für jeden dieser sechs Fälle umgestellt, wobei als Standübersetzung diejenige zwischen Sonnenrad (treibend) und Hohlrad (getrieben) gewählt ist:[6]
(Da die Zähnezahl eines Hohlrades definitionsgemäß einen negativen Wert hat, ist im Beispiel negativ: Minusgetriebe).

| Steg fest | Hohlrad fest | Sonnenrad fest | |||
|---|---|---|---|---|---|
| Antrieb / Abtrieb | Übersetzung | Antrieb / Abtrieb | Übersetzung | Antrieb / Abtrieb | Übersetzung |
| Sonnenrad / Hohlrad | Sonnenrad / Steg | Hohlrad / Steg | |||
| Hohlrad / Sonnenrad | Steg / Sonnenrad | Steg / Hohlrad | |||






| Steg fest | Hohlrad fest | Sonnenrad fest | |||
|---|---|---|---|---|---|
| Antrieb / Abtrieb | Übersetzungs- verhältnis | Antrieb / Abtrieb | Übersetzungs- verhältnis | Antrieb / Abtrieb | Übersetzungs- verhältnis |
| Sonnenrad / Hohlrad | Sonnenrad / Steg | Hohlrad / Steg | |||
| Hohlrad / Sonnenrad | Steg / Sonnenrad | Steg / Hohlrad | |||




Bei nicht gestuften umlaufenden Rädern errechnet sich die Relativdrehzahl des umlaufenden Rads gegenüber dem Steg (Minusradsatz) aus:


Diese Formel kann auch für die Berechnung der Relativdrehzahl des mit dem Hohlrad kämmenden umlaufenden Rads eines Plusradsatzes verwendet werden.
Die Zähnezahl und die Anzahl der umlaufenden Räder ist ohne Bedeutung für die Standübersetzung , hat aber einen Einfluss auf die Drehzahl der umlaufenden Räder und die maximal übertragbaren Drehmomente.

Verteilung der umlaufenden Räder

Die gewöhnlich mehreren umlaufenden Räder lassen sich nur dann gleichmäßig über den Umfang verteilen, wenn folgendes Verhältnis ganzzahlig ist:

- ( , = Zähnezahl des Sonnen- bzw. des Hohlrades)



Das abgebildete Beispiel zeigt ein Getriebe, das ungleiche Teilungswinkel erfordert. Die rechte Darstellung zeigt den nicht möglichen Eingriff der Zähne bei gleichem Teilungswinkel.

Vorteile
Kompakte Bauweise
- geringes Volumen (insbesondere bei Verwendung eines Hohlrades)
- koaxiale Wellen
- Übertragung hoher Drehmomente (Vervielfachung durch mehrere parallele Zahnpaarungen mit mehreren Umlaufrädern)
Zwei- und/oder Dreiwellenbetrieb
- Zweiwellenbetrieb: Die Auswahl zweier von drei Wellen und die Umkehr zwischen treibender und getriebener Welle ergibt 6 mögliche Getriebe.
- Zeitweiser Dreiwellenbetrieb: Ist die dritte Welle im Betrieb durch eine Reibungskupplung fixiert, so kann der Zweiwellenbetrieb durch Entkuppeln und Kuppeln unter Last unterbrochen und wiederhergestellt werden.
- Dreiwellenbetrieb: Addition zweier Drehbewegungen (Summiergetriebe) zu einer dritten oder Verteilung (Verteilgetriebe) einer Drehbewegung auf zwei andere.
Anwendungen
Nabengetriebe
Eine häufige Anwendung des Umlaufradgetriebes erfolgt in Radnaben, wobei die in Fahrrädern schon sehr alt ist (seit etwa 1900).
Nabenschaltung im Fahrrad
In Fahrrad-Nabenschaltungen wird die kompakte Bauweise des Umlaufradgetriebes ausgenutzt. Es ist sowohl wichtig, ein Getriebe in der (Hinterrad)-Nabe unterzubringen, als es auch koaxial betreiben zu können. Primäre Eigenschaft ist seine Schaltbarkeit, nicht seine Grundübersetzung zwischen Kettenritzel und Rad ins Schnelle oder ins Langsame. Im mittleren Gang wird das Getriebe überbrückt und die Übersetzung ist i=1. Ansonsten bedeutet Schalten einen Wechsel zwischen zwei verschiedenen Zweiwellenbetrieben. Das Sonnenrad ist in der Regel fix, so dass die vier anderen Möglichkeiten des Zweiwellenbetriebs wegfallen. Ein langsamer Gang (i>1) entsteht, wenn das Hohlrad treibend gemacht wird, ein schneller (i<1) bei treibendem Steg.[7]
Mehr als drei Gänge werden mit mehr Teilen erreicht, als ein einfacher Umlaufradsatz hat.
Auch die seltenere Tretlagerschaltung am Fahrrad enthält in der Regel ein Umlaufrädergetriebe.
“Außenplanetenachse”
In den Naben der getriebenen Räder von Lastkraftwagen, Omnibussen und Bau- und Landmaschinen kann ein Umlaufradgetriebe für die Übersetzung ins Langsame eingebaut sein. Bei einer solchen Konstruktion sind die antreibenden Teile für relativ kleine Drehmomente ausgelegt, da deren Drehzahl noch größer ist als die der Räder. Genutzt wird die starke Übersetzung ins Langsame vom Sonnenrad zum Steg, das Hohlrad ist fest. Die Umformung am Ende des Antriebsstrangs in der relativ kleinen Radnabe ist infolge der kompakten Bauweise eines Umlaufradgetriebes möglich.
Diese Technik der sogenannten Außenplanetenachse wurde 1953 von Magirus-Deutz eingeführt und in der Folgezeit von zahlreichen anderen Nutzfahrzeugherstellern übernommen.
Elektrischer Nabenmotor mit Getriebe
Der zuerst in Automobilen eingesetzte elektrische Radnabenmotor wird auch in Elektrofahrrädern verwendet. Damit der Elektromotor mit seiner optimalen Drehzahl betrieben werden kann, wird er zweckmäßig mit einem ins Langsame übersetzenden Umlaufradgetriebe kombiniert. Dieses hat den gleichen Zweiwellenbetrieb wie die “Außenplanetenachse”: treibendes Sonnenrad und getriebenes Hohlrad.[8]
Verteilgetriebe
Klassischer Anwendungsfall für ein Verteilgetriebe ist die Leistungsverteilung auf zwei Räder in der Antriebsachse eines Automobils. Dieses sogenannte Differentialgetriebe ist bei heute mehrheitlichem Vorderradantrieb in manchen Fällen nicht mehr mit Kegelrädern sondern mit Stirnzahnrädern versehen und erfüllt in dieser Form das anschauliche Umlaufrädergetriebekonzept. In Allradfahrzeugen kommt zu zwei sogenannten Achsdifferentialen noch ein Zentraldifferential hinzu.
Bei Hybridelektrokraftfahrzeugen gibt es eine Kombinationsvariante, in der die Leistung des Verbrennungsmotors auf die Räder und einen elektrischen Generator verteilt wird.
Bei Luftfahrzeugen mit koaxialen Propellern erfolgt die Leistungsverteilung vom Antrieb auf die zwei gegenläufigen Propeller mit einem Umlaufräder-Verteilgetriebe.
Summiergetriebe

Bei einem Summiergetriebe werden zwei Leistungen zu einer zusammengefasst. In Hybridelektrokraftfahrzeugen ist das die als paralleler Hybrid bezeichnete Kombinationsvariante. Läuft der Elektromotor zunächst rückwärts, dann lässt sich sogar ein kupplungsfreies Anfahren realisieren.
Im abgebildeten Beispiel (Toyota Prius) ist (1) der Abtrieb des Verbrennungsmotors und (2) der des Elektromotors. Beide Motoren treiben die Hinterräder über die Welle (3) an. Im Summiergetriebe dreht der Verbrennungsmotor den Umlaufradträger (4) und der Elektromotor das Sonnenrad (5).
Ein Beispiel ist auch der Antrieb einer Schiffsschraube durch zwei Motoren über ein Summiergetriebe.
Andere Anwendungen haben einen Motor, der große Leistungen bei konstanter Drehzahl liefert. Mit einem kleineren Motor, der sich leicht in der Drehzahl regeln lässt, und einem Summiergetriebe kann auf diese Art eine Drehzahländerung am Ausgang erreicht werden, zum Beispiel in einem Walzwerk, um die Geschwindigkeit bei der Umformung zu variieren.
Im Flugzeugbau sind Anwendungen bekannt, bei denen aus Sicherheitsgründen zwei Elektromotoren eine Kraftstoffpumpe über ein Summiergetriebe antreiben. Fällt einer der Motoren aus (bleibt stehen), kann der andere immer noch die Pumpe mit halber Drehzahl antreiben.

Kuppeln und Schalten
Der Zweiwellenbetrieb wird unterbrochen, wenn die dritte Welle des Umlaufradgetriebes vorübergehend nicht festgehalten wird. Diese Möglichkeit wird als generelle Kupplung oder zum Schalten der Gänge in einem Wechselgetriebe genutzt.
Vorwiegend in der Landtechnik gibt es unter Last schaltbare Kupplungen, die so funktionieren. So wird beispielsweise die Zapfwelle ein- und ausgeschaltet. Das Hohlrad wird fest gebremst beziehungsweise drehbar gelassen.
Klassische Automatikgetriebe in Kraftfahrzeugen haben mehrere hintereinander angeordnete Umlaufradgetriebe. Zum Gangwechsel wird durch Öffnen und Schließen von Reibkupplungen und -bremsen eine andere Übersetzung geschaltet. Dies geschieht als Lastschaltung, es gibt keine Zugkraftunterbrechung.
Stufenlose Drehzahlveränderung
Mit einem prinzipiell für große Leistungen nicht geeigneten stufenlosen Getriebe lässt sich die Drehzahl einer mit großer Leistung versehenen Drehübertragung wie folgt variieren (allerdings bei reduziertem Drehzahlbereich): Zunächst wird die Drehübertragung mit einem Umlaufradgetriebe aufgeteilt. Ein Nebenzweig mit geringerer Leistung wird über ein stufenloses Getriebe zu einem zweiten Umlaufradgetriebe geführt, wo es dann mit der Leistung aus dem Hauptzweig des ersten Umlaufradgetriebes wieder summiert wird.
Eine stufenlose Nabenschaltung
Für Fahrräder gibt es die stufenlose NuVinci-Nabenschaltung. In dieser Markenbezeichnung ist der Name von Leonardo da Vinci enthalten, der das Grundprinzip bereits beschrieben hatte.
Es handelt sich um die bekannte Nabenschaltung mit einem Umlaufradgetriebe, dessen Zahnräder (Formschluss) aber durch Reibräder (Kraft- oder Reibschluss) ersetzt sind. Die Umlaufräder sind zu umlaufenden Kugeln (Kugelrädern) geworden. Durch Schwenken ihrer Achsen relativ zur Nabenachse ändern sich die Radien, auf denen sie rollenden Kontakt mit der treibenden und der getriebenen Scheibe (anstatt Sonnen- und Hohlrad) haben. Das stufenlos mögliche Schwenken bedeutet eine stufenlose Änderung der Getriebe-Übersetzung. Kinematisch stellt die NuVinci-Nabenschaltung ein Umlaufrädergetriebe mit variierbarer positiver Standübersetzung dar.
In der ausgeführten Nabenschaltung ist die Getriebespreizung (Verhältnis von größter zu kleinster Übersetzung) 360 %.[9]
Wie in jeder reibschlüssigen Verbindung ist auch in der NuVinci-Nabenschaltung Schlupf mit daraus folgendem Verschleiß möglich.
Siehe auch
Literatur
- Hugo Klein: Die Planetenrad-Umlaufrädergetriebe. Carl Hanser Verlag München, 1962.
- Fritz Winkler, Siegfried Rauch: Fahrradtechnik Instandsetzung, Konstruktion, Fertigung. 10. Auflage, BVA Bielefelder Verlagsanstalt GmbH & Co. KG, Bielefeld, 1999, ISBN 3-87073-131-1.
- Johannes Volmer: Getriebetechnik Umlaufrädergetriebe. Verlag Technik, Berlin, 1990.
Weblinks
- Umlaufrädergetriebe in der Kfz-Technik bei www.kfz-tech.de
- Verwandtschaft zwischen Umlaufrädergetriebe und Differentialen bei www.arstechnica.de
Einzelnachweise
- ↑ Siegfried Hildebrandt: Feinmechanische Bauelemente. Hanser, 1968, S. 542
- ↑ Gleichachsig ist in geometrischem Sinne gemeint: Die Mittel- beziehungsweise Rotationsachsen sind identisch.
- ↑ Siegfried Wetzel: Planetengetriebe am Fahrrad. 5. Planetengetriebe in der Hinterradnabe des Elektro-Fahrrades Swissbee
- ↑ Bernd Künne: Köhler/Rögnitz Maschinenteile 2. 10. Auflage. Vieweg+Teubner Verlag, 2008, ISBN 3-8351-0092-0, S. 508 (eingeschränkte Vorschau in der Google-Buchsuche).
- ↑ Berthold Schlecht: Maschinenelemente 2: Getriebe, Verzahnungen und Lagerungen. 2. Auflage. Pearson Studium, 2010, ISBN 3-8273-7146-5, S. 787 (eingeschränkte Vorschau in der Google-Buchsuche – Drehzahl-Grundgleichung bzw. Willis-Gleichung).
- ↑ Bernd Künne: Köhler/Rögnitz Maschinenteile 2. 10. Auflage. Vieweg+Teubner Verlag, 2008, ISBN 3-8351-0092-0, S. 509 (eingeschränkte Vorschau in der Google-Buchsuche).
- ↑ Siegfried Wetzel: Planetengetriebe am Fahrrad. 3. Planetengetriebe in Nabenschaltungen
- ↑ Siegfried Wetzel: Planetengetriebe am Fahrrad. 4. Planetengetriebe in elektrischen Nabenmotoren
- ↑ Stiftung Warentest.de: NuVinci-Fahrradnabe –Schalten ohne Gänge. Abgerufen am 8. August 2012.
Anmerkungen
- ↑ Robert Willis, 1800 bis 1875, englischer Ingenieur