Mit Simulation dem Roboterarm zur Hand gehen #
Am Institut für Robotik und Mechatronik der Forschungsgesellschaft Joanneum Research geht es um die Zusammenarbeit zwischen Mensch und Roboterarm. #
Mit freundlicher Genehmigung übernommen aus der Kleinen Zeitung (Donnerstag, 22. Juni 2017)
Von
Norbert Swoboda



Doch ist klar, dass diese Interaktion oder auch Kooperation von Mensch und Maschine ihre Tücken hat: Die Sicherheit muss immer gewährleistet sein, der künstliche Arm muss so programmiert sein und so reagieren, dass der Mensch nicht gefährdet ist.
Am Institut für Robotik und Mechatronik der Forschungsgesellschaft Joanneum Research mit Sitz in Klagenfurt beschäftigt sich eine Forschergruppe rund um Uni- Dozent Michael Hofbaur genau mit diesen Fragen. Dabei kommen Simulationswerkzeuge zum Einsatz.
Roboterarme kommen mit einem Betriebssystem und Software, müssen aber an die konkrete Aufgabe angepasst werden. „Üblicherweise verwendet man da ein Teach-in-Verfahren“, erläutert Hofbaur. Dabei wird händisch der Roboterarm geführt, die einzelnen Stellungen werden abgespeichert und programmiert.
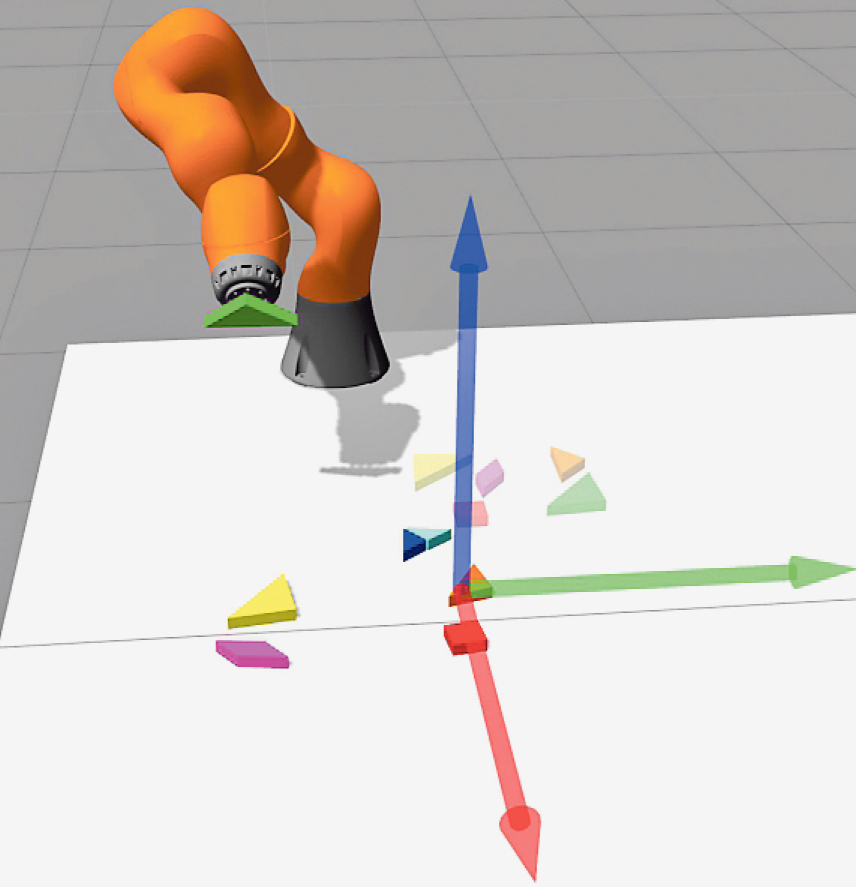
Doch das hat Grenzen: „Bei dieser klassischen Methode kann man bestimmte Bewegungen nur sehr schwer realisieren. Deshalb ist es oft besser, die wirkliche Welt virtuell nachzubilden und in dieser virtuellen Welt den Roboterarm zu programmieren.“
Zwei Methoden werden verwendet: Physikbasierte Simulationen orientieren sich an der realen Welt. Simulierte Roboter und Sensoren werden mit der Software bedient. Damit kann man überprüfen, ob Bewegungen überhaupt möglich sind, ohne dass man erst alle möglichen Varianten „händisch“ durchprobieren müsste.
Solche Simulationen sind unumgänglich, wenn man verschiedene Varianten vergleichen will oder wenn mehrere Roboter zusammenspielen müssen. Das Institut beschäftigt sich auch mit einer zweiten Simulationsart, die nur auf mathematischen Methoden beruht.
Ein Hauptzweck all dieser Simulationen ist es auch, potenzielle Gefahren bei der Interaktion von Mensch und Maschine schon vorab zu erkennen. Am Computer können dabei Szenarien entworfen werden, die man in der Realität nicht ernsthaft durchführen könnte. Freilich: „Simulation ist ein ganz großes Tool, aber man kann damit nicht alles machen. Es ist noch immer notwendig, auch messtechnisch die Ergebnisse zu überprüfen.“